Using Dynamixel's RoboPlus without USB2Dynamixel
Recently I needed to debug Dynamixel's MX-12W smart servo motor which didn't work in multi-turn mode.
Having exhausted all other options (reading datasheet carefully, probing data line to verify that MCU sends what I think it should send), I decided to try moving the motor using Dynamixel's RoboPlus software.
Usually one needs USB2Dynamixel (a glorified USB-to-TTL/RS485 adapter) which I obviously did not have on hand.
I had a few FTDI breakout boards so I took the one with most signals, connected the one with most signals broken out to PC and probed those signals with a logic analyzer.
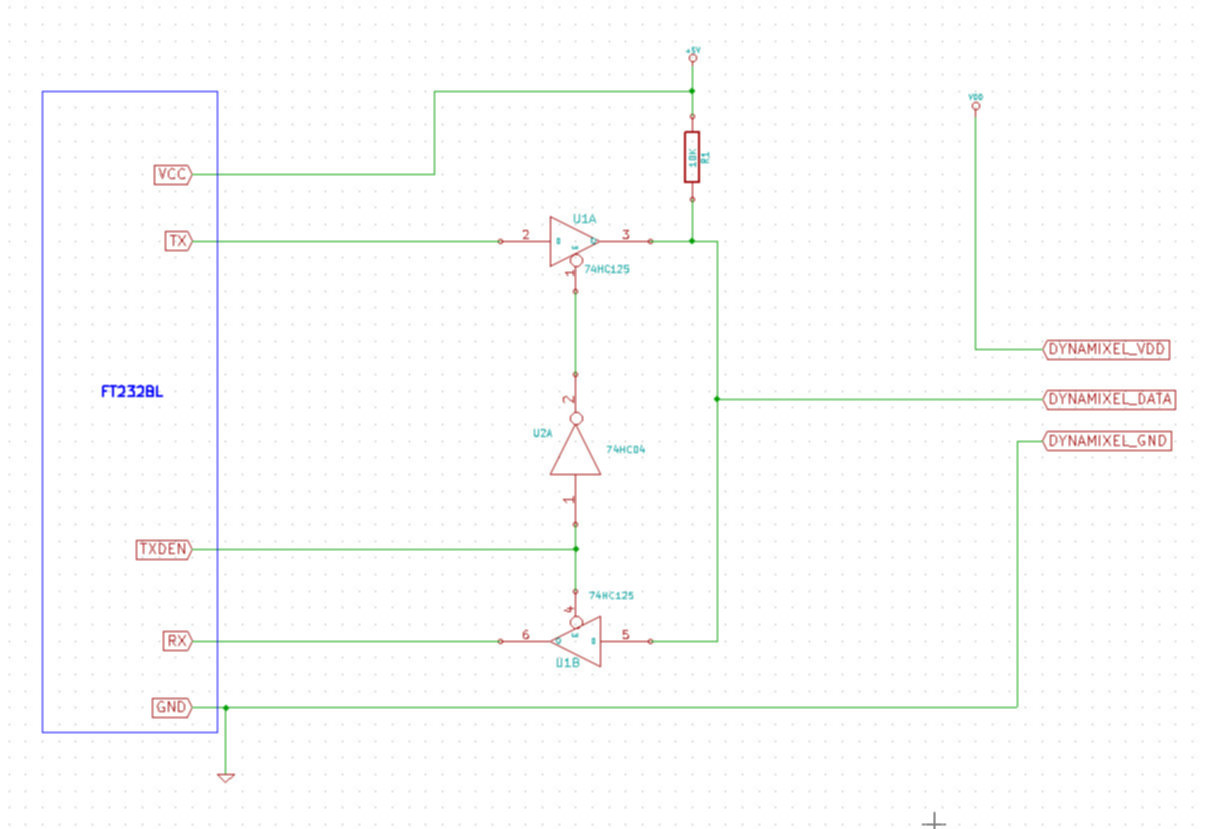
That led me to the following schematics, which can be used to control all Dynamixel's smart servos which use half-duplex TTL-level UART.
Oh, and the problem mentioned in the first line? Firmware upgrade for servo fixed the problem.
Comments